絶賛お悩み中だった、ボートの買い替えでしたが今回は見送ることになりした。色々な条件を加味して決断した時には、すでに買い手が見つかっていたのです。あえて言うなら、乗れるボートがあることでそれほど急いではいなかった。欲しいという事はありましたが、一点だけ不安があったのです。それは、エンジンが回りすぎている点、これ一点がすごく悩ましい点でした。
それなりに回っているので、もしエンジンが壊れてしまったら載せ替えるなければならない! 前オーナーの乗り方を知らない。アワーメーターが回っていたとしても釣行中もエンジンを切らずにアイドリング状態で釣りをしている状態であれば、当然アワーメーターが回ってしまう。この場合だとたとえ回っていたとしても問題なく使用はできるでしょう。
しかし、釣行中はエンジンを止めていればそれなりにエンジンは傷んでいる可能性が高い、メンテナンスもしっかりと行っているのか? なども本当のことはわかりませんからね。ボートにとってエンジンは最大の問題です。もし、海上でエンジンがストップしてしまえば、多くの人に面倒をかけてしまう結果になるのは明白なわけで・・・。エンジンさえ問題なければ、即買いだったのですけど、ウジウジ悩んでいた結果が買い手が見つかったという結果で終わりました。
現在のボートは新エンジンなのでそのような問題はありませんし、オイル交換もしっかりと行っています。フルパワーで走ることもありません。いままで最大航走したことがないと思います。最大航走したらボートが壊れそう(笑)。
という訳で、狙っていたボートとは縁がなかったということで解決しました。私は長らく不動産を経験して来ていましたので、縁がなかったということはよくあることです。ボートも同じだな〜とも感じました。
現在のボートに手を加えようと思っています。まずは、マルチスキャンは決定てしおります。キャスティングレールも行います。これらは、ゴールデンウィーク明けに施工してもらう予定になっています。魚探も古いので使えることは使えるのですが、精度が悪く感じますのでプロッター魚探をどうするかはまだ悩んでいます。どれもこれもなかなかのお値段なんでね。魚探、スキャン、レーダーなどを揃えると簡単に経自動車の新車くらいは買えちゃいます。
結局、最終決定はHDX-8CとHE-773、レーダーは見送りにしました。メインはHE-773でマルチスキャンというものを利用します。一般的に言われる魚探は実は魚探に反応したとしてもそれは船の近くにいることはわかるのですが、船から最大200メートル離れている場合でもまるで真下にいるかのように反応します。
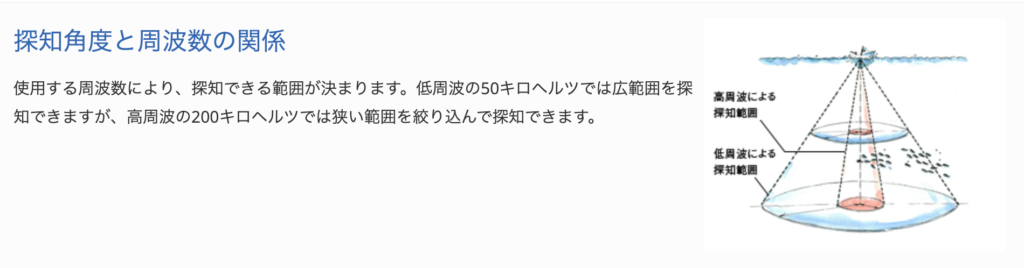
探査範囲が図のように円錐で広がっていきます。水深100メトールくらいからは広がりはなくなりますが、その後は広がらなくなります。とは言え船から全周囲の半径200メートルをあたかも船の下にいるように表示されます。上層にいれば明確にわかるでしょうが、水深100メートルともなれば精度はまったくないといってもいいでしょう。
これを解決するのは、マルチスキャンです。
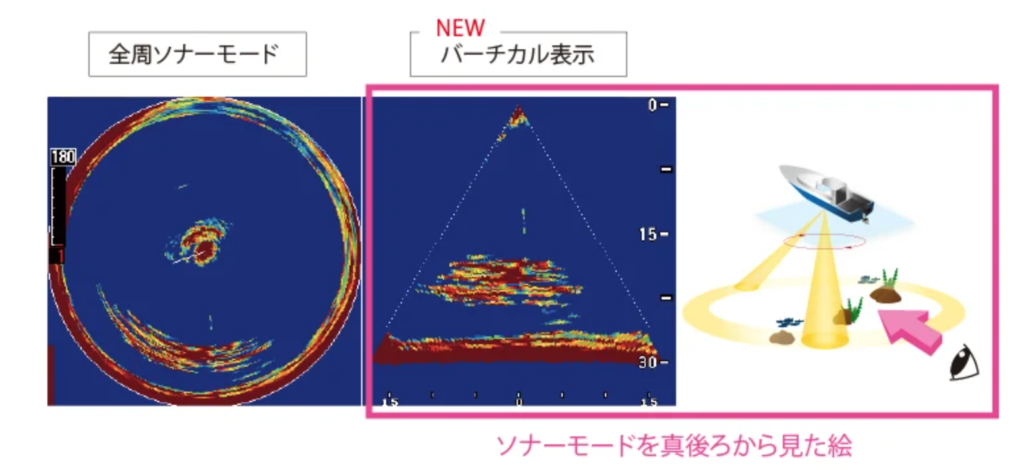
マルチスキャンがあれば、方向や水深もわかります。全周ソナーモードでは船の後方に魚がいることがわかります。水深も25メートルから18メートルにいることがかわります。ソナー角度も設定できるので真下から前方10度も可能なので、どの方向に泳いでいくのかもわかるので予測が可能になります。
サイトフィッシングとも言えるイメージでしょう。通常の魚探からは格段に精度があがります。HDX-8CはGPSでの位置確認と大きな特徴はディプスマッピングという機能です。この機能は標準の地図では表現できない海底隆起をしることができます。水深は100メートル程度であれば1メートル間隔で現状の等深線を描写してくれます。
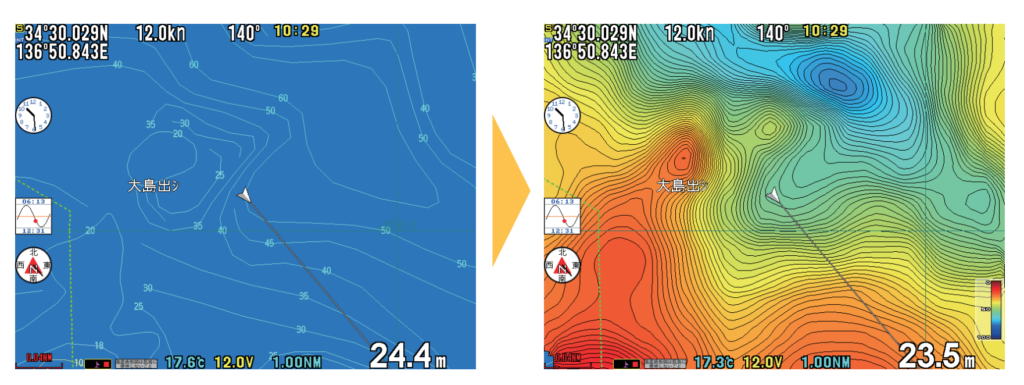
等深線はデータを元に予測で表示されているようなので、正確ではありません。ある程度は正しいのですが、海の状況は台風などになり海底が変わったりします。ディプスマッピングでは自分で計測をして地図を作り上げていく感じとなります。
積丹の海域を作り上げていきたいと思っています。計測中は速力も遅いので時間はかかりますが一度作り上げれば使える海図となるはずです。合わせて、マルチスキャンを使って漁礁なども調べることができます。
今年は動画も撮れるようにと思っていますが、忙しくなるとなんとなく撮りっぱなしにしてしまい、編集作業が果てしない時間がかかるので、その間Macをいじれないので撮っては消してって感じになっています。でも、今年は撮ります!