マルチスキャンを装備しての初出航は良くありませんでした。しかし、良く見えるというのを実感しました。まだ、使い始めなので不慣れな部分がありましたけど魚探と合わせると相当な味方になると思います。
特に何が良いかというと魚の方向がわかるという点です。右にいるのか、左にいるのかが明確になるのです。もちろん、魚なので泳いでいますのでソナーモードで写った時にはもういないということはあります。過去の映像を可視化するので当然なのですが・・・
回遊魚は移動速度が早いので、写ってからではもう遅い場合がほとんどですが、右か左かだけでもわかれば相当のアドバンテージにもなります。ドテラ流しの時のラインの放出角度とターゲットの水深と距離がわかれば、概ねのライン長がわかります。
来月から始まるマグロについて、例えば水深が600メートルのポイントがあったとしましょう。この場合は魚探は中深海専用の魚探が必要になります。ソナーモードの場合は水深設定を200メートルとすることで200メートルを探知できるようになります。200メートルあれば十分ですね。もっと上を探すなら80メートルの設定をするとキャスティングからジギングまで活用方法は多くあります。
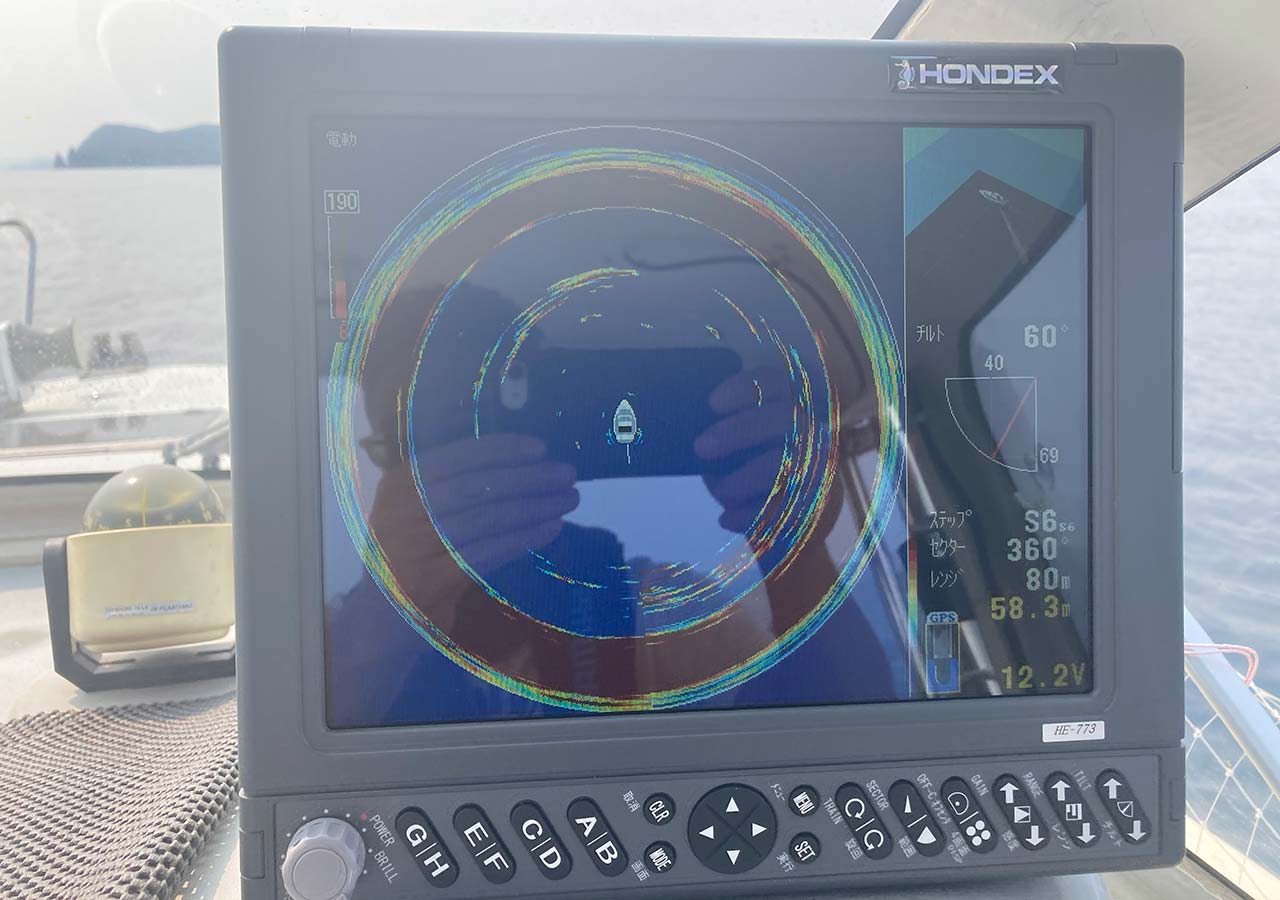
実際の画面はこちら

黒の線は海底 58.3mとなっています。レンジ(調べる深さ)を80mとして360度を探知している。赤の線で囲まれているのはベイトで所々でブリらしき反応もありました。(ここには写っていません)魚探にも同時に反応がありました。
画像の状況からは左舷前方と右舷後方が良いと判断できます。チルトとあるのはどの範囲までを探索するのか? となります。他の使い方ではライン角度に合わせるとダイレクトで狙えるようになります。この画面では見えていませんが、赤い線の深さと距離も表示させることができます。
見づらいですが、右下にGPSという表示で何やらモグラ叩きゲームの反対になった形があります。これが振動子というものです。船艇から突き出すようになっており、精度もかなりあると思います。微速で航走している時も出すことができますが、ある一定以上のスピードに達すると自動で格納されます。船艇から出る部分は10センチ程度です。
ソナーには反応があるが、魚探には反応がないということは多くありました。ソナーの感度は低めの設定していても同じでした。流石にこの画像の時は、魚探にもしっかりと反応がありました。でも、ソナーの方が早く表示されて、遅れて魚探に映る状況でした。
漁礁などもわかりますね。どの方向か分かる点は良い点です。活用の範囲が相当増えますし、操作はまだまだ練習中です。
今回は、海の中が静かすぎて勉強しようにもなかなかうまくいきません。もっと魚がいて、実際に釣れると精度も上がるのでしょう。


